王 琳,王宏华,路天航,王成亮
(1.河海大学能源与电气学院,江苏 南京 211100;
2.江苏方天电力技术有限公司,江苏 南京 211102)
为实现碳达峰、碳中和,急需建设大规模的清洁能源发电系统[1-2]和特高压直流输电工程,但特高压直流输电工程的快速建设,虽然带来了良好的经济效益[3],同时也带来了受端动态无功补给不足和电压支撑能力减弱的问题。
调相机作为动态无功补偿装置具有较强无功支撑能力,在系统出现扰动或者故障时可以维持系统电压稳定[4-6]。关于调相机与直流系统协调控制的研究:洪权等[7]将滤波器组(电容器组)投切时的电压变化量作为调相机的无功控制修正量,从而降低了交流电压波动,减小了换相失败风险,同时利用调相机无功补偿减少电容器组投切次数,增加了电容器组的使用寿命。刘增训等[8]通过调相机吸收无功来抑制送端换流站暂态过电压,利用交流滤波器对换流站无功适当过补,以此减少系统静态无功补偿容量的投入来抑制事故后稳态电压偏高。陈波等[9]将交直流系统无功交换量和调相机剩余可调容量作为滤波电容器组的投切修正指令和调相机无功输出指令,减少了滤波电容器组的投入,增加了调相机的稳态初始无功出力。给调相机合理配置足够动态无功裕量及静态无功支持能力,可以抑制直流换流失败,避免滤波器投切造成的交流电压波动[10-11]。上述研究集中在调相机与直流换流站中的电容器、滤波器等无功补偿设备之间的协调控制,并未涉及调相机与直流控制系统之间的协调控制。
关于通过直流控制系统调节无功输出的研究,涂仁川等[12]对比分析了换流器无功调节器(QPC)和低负荷状态的无功优化(LLRPO),利用QPC或LLRPO辅助无功控制功能与低压电抗、STATCOM进行无功平衡控制配合。采用降低直流电压参考值和增加触发角或关断角2种方式来增加换流站的无功消耗,用以解决直流低负荷运行时无功过剩问题[13-14]。这些研究中利用直流控制系统辅助无功控制功能来增加换流器本身无功消耗,以此抑制送端电网过电压,没有考虑调相机参与HVDC系统的无功调节。
本文针对高压直流输电受端系统,以抑制故障后受端系统过电压为目标,通过分析逆变侧关断角、触发控制角及换相角对直流系统逆变站无功特性的影响,在逆变侧直流控制系统中引入QPC,提出一种HVDC系统中调相机与逆变侧关断角协调控制策略,以期达到HVDC系统的最佳恢复和运行特性,提高受端电网的安全稳定水平。
如图1所示,直流系统对交流系统的作用可以等效为换流母线处的时变注入电流或功率。图1中,Us为逆变侧交流母线电压kV;
Udn为直流系统额定电压,kV;
Idn为直流系统额定电流,kA;
Pdn为直流系统有功功率,MW;
Qdn为换流器(包括换流变)消耗的无功功率,MVar;
Qcn为滤波器、电容等无功补偿装置的无功功率,MVar;
Qsc为调相机发出的无功功率,MVar;
Qs为直流系统从电网吸收的无功功率,MVar。

图1 直流系统逆变站功率平衡示意图Fig.1 Schematic diagram of power balance of HVDC system at inverter station
逆变站稳态运行时,如果不考虑交流和直流的谐波分量,可求出无功功率Qs[15]:
Qs=Qdn-Qcn-Qsc
(1)


Qdn、Udn、Pdn也可表示[16-17]为

(2)

式中:KT为换流变压器变比;
N为6脉波换流桥的个数;
XT为等效换相电抗,Ω;
Bcn为滤波器、电容等无功补偿装置的等效电纳;
φ为换流站功率因数角,(°);
γ为关断角,(°);
θ为逆变侧触发控制角,(°);
θ为换相角,(°);Uk为换流变压器短路阻抗,%;
Sn为换流变压器额定容量,MVA。
由式(1)和式(2)可知,逆变站吸收的无功和直流系统的无功动态响应与Us、Idn和γ有关。
计算的初始条件:Us=230 kV,Udn=500 kV,Idn=2 kA,Pdn=1 000 MW,Sn=519.8 MVA,KT为230/209.228,Uk=18%,计算得到XT=13.315 Ω。
根据初始条件和式(2)可以计算出:初始运行点的触发超前角β0=38.2°[18],初始运行点的关断角γ0=15°。由式(2)可知,当交流系统扰动或发生故障导致Us下降时,为了保持γ不变,关断角固定常规控制将增大换流器的逆变侧触发控制角β(图2)。逆变站交流母线电压初始运行值越高,β越大,γ就越大,发生换相失败的可能性越小。

图2 γ随β和Us的变化Fig.2 Variations of γ with β and Us
由图3可知,当Us不变时,Qdn随γ的增加而增加。当系统发生故障时,保持γ不变,β会增加,换流器无功消耗也会增加,从而进一步降低了故障期间的换流母线电压。

图3 Qdn随γ和Us的变化Fig.3 Variations of Qdn with γ and Us
调相机励磁控制系统主要包括测量环节、励磁控制器、励磁机、限幅环节,如图4所示,其中,s为复变量,Uref为逆变侧交流母线基准电压,Ut为经过测量环节后的逆变侧交流母线电压,Emax为调相机最高励磁电压,Emin为调相机最低励磁电压,Efd为调相机励磁电压,TR为终端电压传感器的时间常数,Tc、Tb分别为该控制器的超前时间常数和滞后时间常数,KA、TA分别为比例系数和时间常数。将故障引起的逆变侧交流母线电压改变量作为调相机励磁控制系统的控制量,并根据调相机励磁控制系统稳定性来调整其励磁控制参数。测量环节对交流电压的测量过程进行模拟,励磁控制器采用串联校正。测量环节和励磁控制器的传递函数分别为
(3)

图4 调相机励磁控制系统Fig.4 Exciter control system of synchronous condenser
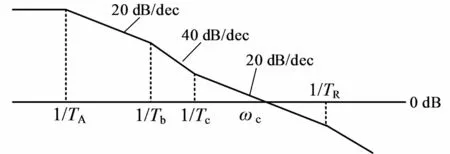
图5 串联校正励磁系统bode图Fig.5 Bode diagram of series correction excitation system
对于图5所示串联校正励磁系统(ωc为剪切频率),根据频率响应特性来确定参数值,其指标范围值:增益裕度为10~20 dB;
相位裕度为20°~80°。
励磁机的动态模型为
(4)
如果不计电压测量环节的时间常数,此时的暂态增益Kt为[19]
(5)
ωc与Kt的关系为
(6)
根据式(6)求得Kt。
对于稳定的系统,幅频曲线必须以斜度20 dB/dec穿过0 dB线,Tc按式(7)求得[19]。
(7)
式中n为ωc与1/Tc之间的倍数。
由式(6)和式(7),可求得式(5)中Tc与Tb的比值。
通过对关断角固定的常规控制系统进行改进,将Us的改变量作为QPC的控制量,将QPC的输出作为QPC控制关断角增量Δγ,如图6所示。图6中ΔIdn为逆变侧直流电流偏差量,逆变侧直流电流偏差控制是当逆变侧直流电流低于直流指令值时,将逆变侧直流电流偏差量ΔIdn通过上升斜波函数转变为逆变侧直流电流偏差控制关断角增量Δγi;
Kqp、Kqi分别为待优化的比例、积分系数;
Kip、Kii分别为关断角控制器的比例和积分系数;
Ki1、Ti1分别为逆变侧换流站的比例系数和时间常数;
Ki2、Ti2分别为测量环节的比例系数和时间常数;
γm为经过测量环节后的关断角;
θmax为最大逆变侧触发控制角;
θmin为最小逆变侧触发控制角。

图6 加入QPC的逆变侧直流控制系统Fig.6 DC control system with QPC at inverter side
QPC采用PI控制器,其传递函数为
Gq(s)=Kqp+Kqi/s
(8)
在逆变侧固定关断角控制系统中,通过关断角控制器、限幅环节、逆变侧换流站、测量环节,依次对逆变侧关断角进行处理。关断角控制器采用PI控制器,其传递函数为
G0(s)=Kip+Kii/s
(9)
将逆变侧换流站表示为一阶惯性环节形式,其传递函数为[20]
(10)
其中Ki1=Δγ/Δβ≈sinβ0/sinγ0Ti1=0.02/12=1.667 ms
式中:β0取值为38.2°;
γ0取为15°。
测量环节可表示为一阶惯性环节[21],其传递函数表示为
(11)
式中:Ki2=1,Ti2=0.02 s。
逆变侧定关断角控制系统的传递函数为
(12)
目标函数Jobj_ITSE设计为逆变侧交流母线电压改变量ΔU(t)的平方乘以时间再积分,可表示为

(13)
利用PSCAD/EMTDC仿真软件中Optimum Run对QPC参数进行寻优。在时间乘平方误差积分(ITSE)准则下,对QPC控制器的PI参数进行优化,应用ITSE性能指标可得到使目标函数最小的一组PI参数。
Optimum Run以目标函数Jobj_ITSE的当前值作为输入,通过优化算法确定QPC控制器的PI参数Kqp和Kqi的值,优化算法选取了直接提供的单纯形算法。为防止无法搜索到最优值,可以设置最大仿真次数,当到达最大仿真次数时,运行自动停止。
QPC控制是通过增加关断角来增加逆变站吸收故障后调相机的无功输出[22],从而抑制逆变侧交流母线过电压,因此QPC控制参数与调相机励磁控制参数有关。根据故障后逆变侧交流母线电压恢复情况,选取较为理想的调相机励磁控制器与QPC的参数值。
基于PSCAD/EMTDC搭建含调相机的HVDC系统的数值仿真模型,如图7所示,图中,VacR为整流侧交流电压瞬时值,VrmsR为整流侧交流电压有效值,VacI为逆变侧交流电压瞬时值,VrmsI为逆变侧交流电压有效值,Vref为逆变侧交流电压参考值,Vabc为逆变侧交流电压,If为调相机励磁电流,Te为电磁转矩,Tm为机械转矩,w为转速,验证调相机与逆变侧关断角协调控制策略对提高系统稳定性的效果。

图7 含调相机的HVDC系统的数值仿真模型Fig.7 Numerical simulation model of HVDC system with synchronous condenser
在系统运行2.0 s时逆变侧设置短路故障,并在故障后0.2 s清除故障,观察逆变侧交流母线电压恢复时间、故障时和故障消除后的逆变侧交流母线电压大小。
分别对如下3个案例在逆变侧交流系统发生短路故障下响应进行仿真分析:案例1:HVDC系统中未投入调相机,HVDC控制系统中未加入QPC;
案例2:在逆变侧交流系统中投入调相机,HVDC控制系统中未加入QPC;
案例3:在HVDC控制环节中加入QPC,将调相机励磁控制与加入QPC的逆变侧关断角控制系统进行协调控制。
3个案例的逆变侧交流母线电压仿真结果对比情况如图8所示,逆变侧交流母线电压恢复情况见表1。由图8和表1可知,当采用案例1时,逆变侧交流母线电压降至161.0 kV。在换相失败期间,为了增大换相裕度,逆变侧触发角将减小,导致增加逆变站的无功消耗,从而降低了故障期间逆变侧交流母线电压。当采用案例2时,由于调相机瞬时发出大量无功功率,逆变侧交流母线电压可升至约204.7 kV,加快故障后交流母线电压恢复时间。调相机的投入可提高故障期间的交流母线电压,但也易引起故障消除后交流母线电压升至273.7 kV。与案例1相比,案例3在故障时的逆变侧交流母线电压升至约204.7 kV,高于案例1,有效提高故障时逆变侧交流母线电压。与案例2相比,案例3在故障消除后的逆变侧交流母线过电压降低了23 kV,有效抑制故障后受端母线过电压。与案例1和案例2相比,案例3的逆变侧交流系统电压的恢复时间为80 ms,低于案例1和案例2,有效加快了逆变侧交流母线电压恢复时间。

图8 逆变侧交流母线电压Fig.8 AC bus voltage at inverter side
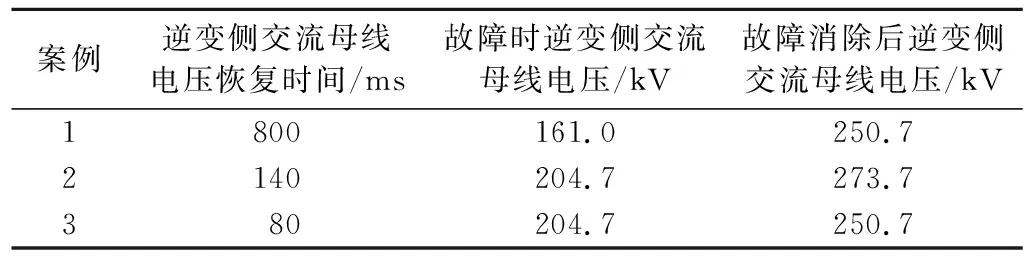
表1 逆变侧交流母线电压的恢复情况
从图9可以看出,与案例1和案例2相比,故障时的一次换相失败后,案例3的逆变侧关断角的上升幅值大于案例1,其变化幅度小于案例2,从而避免换相失败的再次发生。案例3的逆变侧关断角在2.20 s故障消除后快速上升,并在2.30 s后快速下降,在2.20~2.30 s之间,逆变站所吸收无功随关断角的增大而增加,有效抑制故障后逆变侧交流母线过电压。
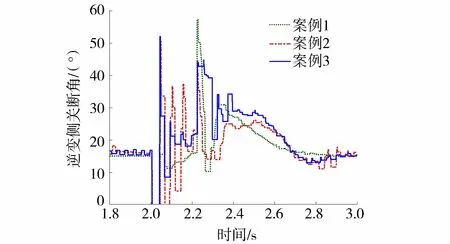
图9 逆变侧关断角Fig.9 Extinction angle at inverter side
从图10可以看出,故障时逆变侧直流电流瞬时增大,直流电压将下降,触发低压限流环节,直流电流指令值也将下降。案例3的逆变侧直流电流的振荡幅值小于案例2。在2.20 s故障消除后,案例3的逆变侧直流电流与直流电流指令偏差远小于案例1,说明案例3在故障后直流电流基本上跟随直流电流指令变化。

图10 逆变侧直流电流Fig.10 DC current at inverter side
针对HVDC系统受端电网故障消除后过电压问题,将调相机励磁控制与逆变侧关断角控制相协调,提出了调相机与逆变侧关断角协调控制策略,通过分析直流控制参数对直流输电系统的影响,引入无功调节器(QPC)到逆变侧关断角控制系统中,协调整定调相机无功调节参数和QPC控制参数。仿真结果表明,本文方法可有效降低故障后逆变侧换流站过电压,同时加快受端交流电压的恢复时间,提高故障后HVDC系统的安全稳定性。
猜你喜欢线电压励磁直流同步调相机励磁前馈式强励控制方法研究大电机技术(2022年3期)2022-08-06“宁电入湘”直流工程再提速宁夏电力(2022年1期)2022-04-29励磁变压器励磁涌流引起的调相机跳闸分析河北电力技术(2021年2期)2021-07-29某110 kV变电站装设低压电抗器的可行性研究山东电力高等专科学校学报(2019年5期)2019-11-01关于《三相交流电源》章节的教学探析课程教育研究·学法教法研究(2018年20期)2018-08-11基于开关表的直流微电网控制及其仿真自动化与仪表(2018年7期)2018-07-31一款高效的30V直流开关电源设计通信电源技术(2018年3期)2018-06-26基于励磁阻抗变化的变压器励磁涌流判别方法的探讨电子制作(2018年1期)2018-04-04风电汇集站无功控制策略研究中国设备工程(2017年24期)2017-12-28变电所如何快速查找直流系统接地海峡科技与产业(2016年3期)2016-05-17扩展阅读文章
推荐阅读文章
推荐内容
恒微文秘网 https://www.sc-bjx.com Copyright © 2015-2024 . 恒微文秘网 版权所有
Powered by 恒微文秘网 © All Rights Reserved. 备案号:蜀ICP备15013507号-1